






BOSM- ଭୂସମାନ୍ତର କାଉଣ୍ଟର ଡ୍ରିଲିଂ ଏବଂ ବୋରିଂ ମେସିନ୍ |
ଉପକରଣ ବ୍ୟବହାର:
ଟାୱାର କ୍ରେନ୍ କ୍ୟାପ୍ ପ୍ରକ୍ରିୟାକରଣ ପାଇଁ ଆପଣଙ୍କ କମ୍ପାନୀ ପାଇଁ BOSM ଭୂସମାନ୍ତର କାଉଣ୍ଟର ଡ୍ରିଲିଂ ଏବଂ ବିରକ୍ତ ମେସିନ୍ ଏକ ସ୍ୱତନ୍ତ୍ର ମେସିନ୍ | ମେସିନ୍ଟି hor ଟି ଭୂସମାନ୍ତର ଡ୍ରିଲିଂ ଏବଂ ବିରକ୍ତିକର ପାୱାର୍ ହେଡ୍ ସହିତ ସଜ୍ଜିତ ହୋଇଛି, ଯାହାକି ପ୍ରଭାବଶାଳୀ ଷ୍ଟ୍ରୋକ୍ ପରିସର ମଧ୍ୟରେ ଡ୍ରିଲିଂ, ମିଲ୍ ଏବଂ ୱର୍କିପ୍ସର ବିରକ୍ତିକୁ ଅନୁଭବ କରିପାରିବ | କଟିଙ୍ଗ ଏବଂ ଅନ୍ୟାନ୍ୟ ପ୍ରକ୍ରିୟାକରଣ, ଯନ୍ତ୍ରପାତିର ପୋଜିସନ୍ ସ୍ପିଡ୍ ଦ୍ରୁତ, ପ୍ରକ୍ରିୟାକରଣର ସଠିକତା ଅଧିକ ଏବଂ ପ୍ରକ୍ରିୟାକରଣ ଦକ୍ଷତା ଅଧିକ |
2। ଯନ୍ତ୍ରପାତି ଗଠନ ବ characteristics ଶିଷ୍ଟ୍ୟଗୁଡିକ:
2. 1 ର ମୁଖ୍ୟ ଉପାଦାନଗୁଡ଼ିକ |ମେସିନ୍
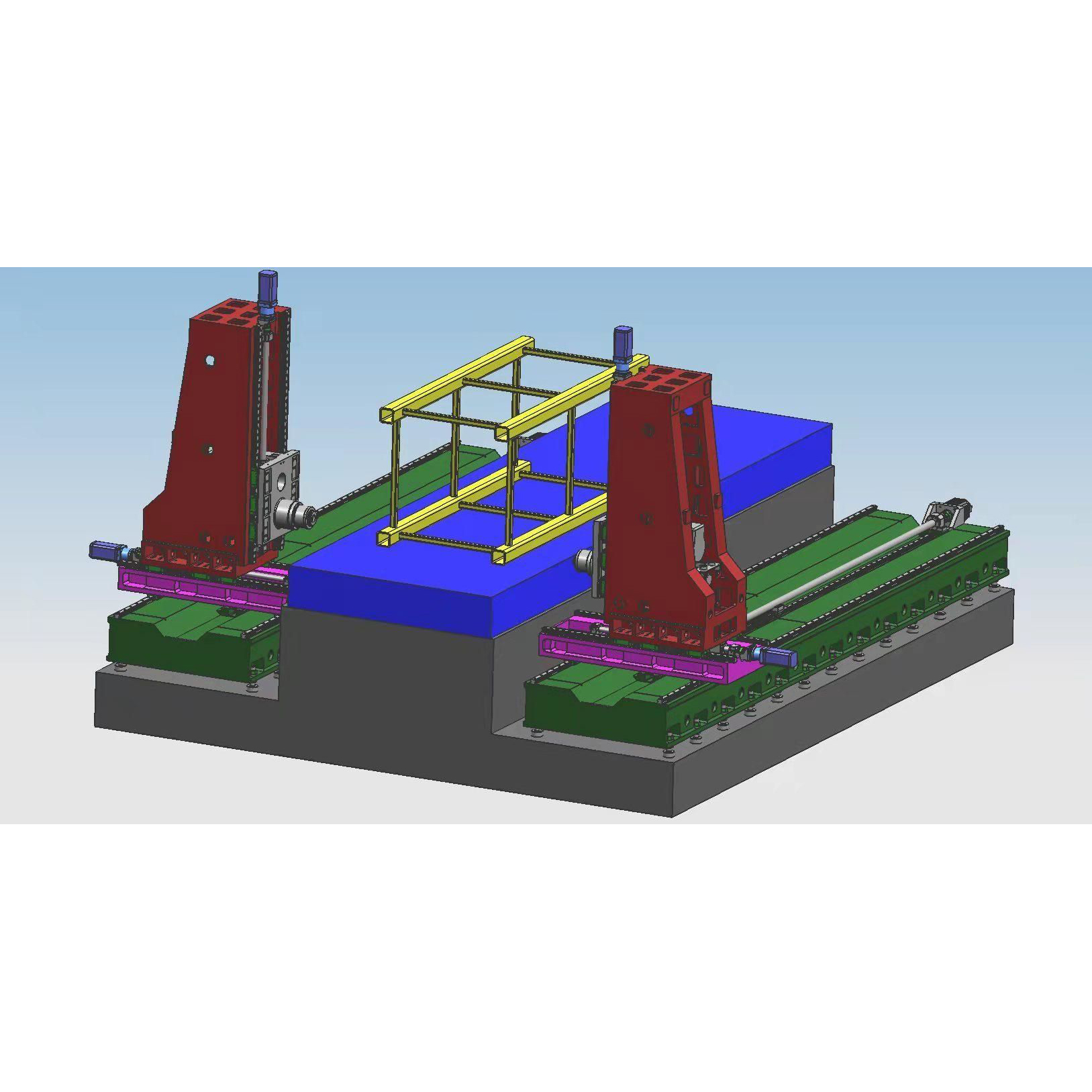
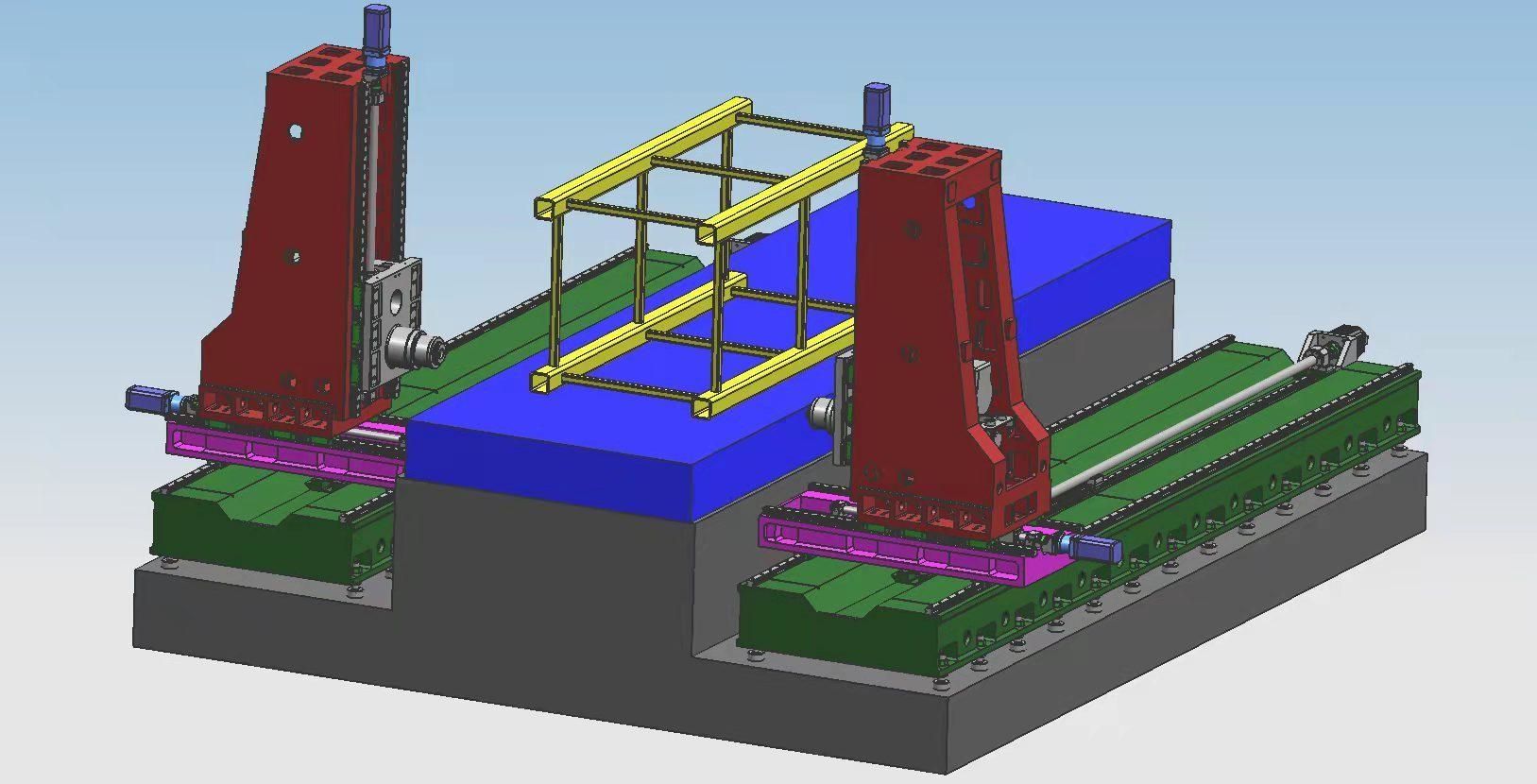
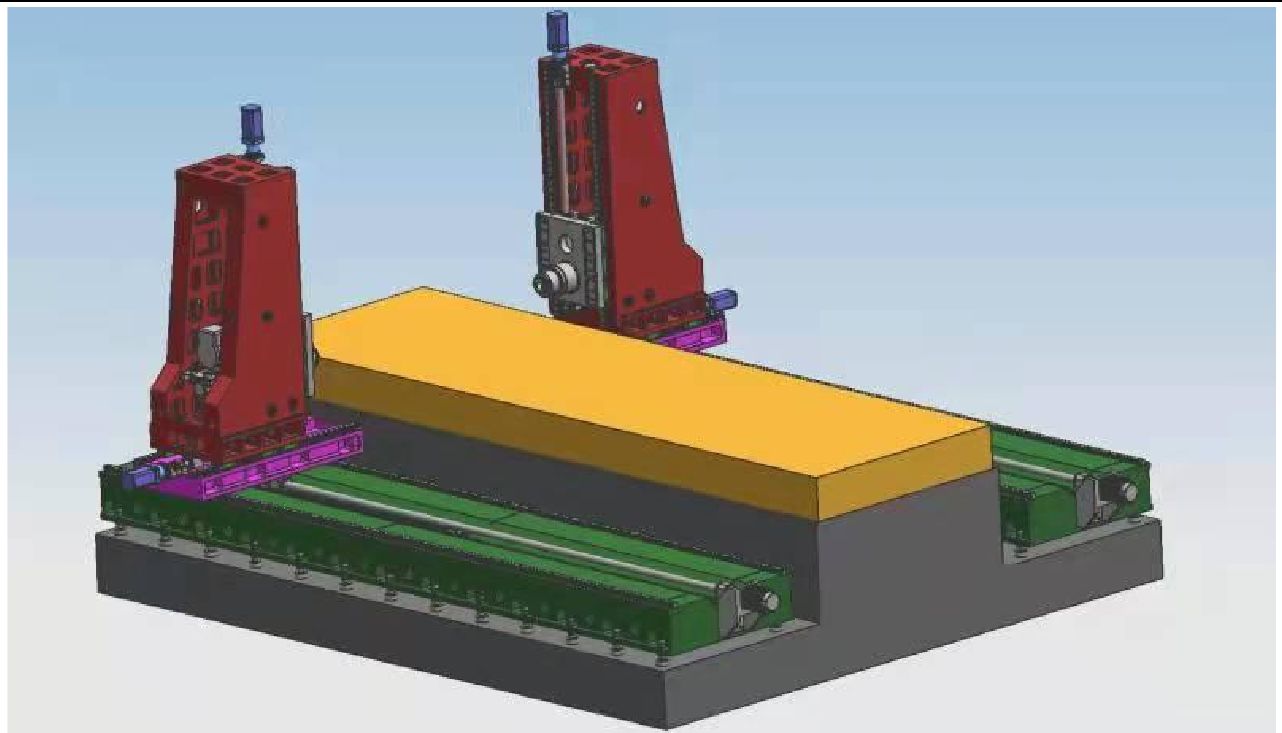
ଯନ୍ତ୍ରର ମୁଖ୍ୟ ଉପାଦାନଗୁଡ଼ିକ: ଶଯ୍ୟା, କାର୍ଯ୍ୟକ୍ଷେତ୍ର, ବାମ ଏବଂ ଡାହାଣ ସ୍ତମ୍ଭ, ସାଡଲ୍, ରାମ ଇତ୍ୟାଦି, ବଡ଼ ଅଂଶଗୁଡ଼ିକ ରଜନୀ ବାଲି ଛାଞ୍ଚ, ଉଚ୍ଚମାନର ଧୂସର ଲୁହା 250 କାଷ୍ଟିଂ, ଗରମ ବାଲି ଗର୍ତ୍ତରେ କମ୍ପନ → କମ୍ପନ ବାର୍ଦ୍ଧକ୍ୟ → ଗରମ | ଫର୍ଣ୍ଣେସ୍ ଆନ୍ନାଲିଙ୍ଗ୍ → କମ୍ପନ ବାର୍ଦ୍ଧକ୍ୟ → କଠିନ ଯନ୍ତ୍ର → କମ୍ପନ ବାର୍ଦ୍ଧକ୍ୟ → ଫର୍ଣ୍ଣେସ୍ ଆନ୍ନାଲିଙ୍ଗ୍ → କମ୍ପନ ବାର୍ଦ୍ଧକ୍ୟ → ଅଂଶଗୁଡ଼ିକର ନକାରାତ୍ମକ ଚାପକୁ ସମ୍ପୂର୍ଣ୍ଣରୂପେ ଦୂର କରିବା ଏବଂ ଅଂଶଗୁଡିକର କାର୍ଯ୍ୟଦକ୍ଷତାକୁ ସ୍ଥିର ରଖିବା | ଯନ୍ତ୍ରର ୱର୍କବେଞ୍ଚ ସ୍ଥିର ହୋଇଛି, ଏବଂ ଉଭୟ ପାର୍ଶ୍ୱରେ ଥିବା ପାୱାର ହେଡଗୁଡିକ ଆଧାରର ଆଗ ଏବଂ ପଛ ଦିଗରେ ଗତି କରିପାରିବ; ଯନ୍ତ୍ରର କାର୍ଯ୍ୟଗୁଡ଼ିକ ଅଛି ଯେପରିକି ଡ୍ରିଲିଂ, ବିରକ୍ତିକର, କାଉଣ୍ଟରସିଙ୍କିଂ, ଟ୍ୟାପ୍ ଇତ୍ୟାଦି | ଉପକରଣର କୁଲିଂ ପଦ୍ଧତି ହେଉଛି ଆଭ୍ୟନ୍ତରୀଣ କୁଲିଂ ଏବଂ ବାହ୍ୟ କୁଲିଂ | ମେସିନରେ feed ଟି ଫିଡ୍ ଆକ୍ସ, cut ଟି କଟିଙ୍ଗ୍ ପାୱାର୍ ହେଡ୍ ଥାଏ, ଯାହା ଏକ ସମୟରେ ax ଟି ଅକ୍ଷ ସହିତ ସିଙ୍କ୍ରୋନାଇଜ୍ ହୋଇପାରେ, କିମ୍ବା ଏକକ-ଆକ୍ଟିଙ୍ଗ୍ ହୋଇପାରେ | ମେସିନ୍ ର ଅକ୍ଷୀୟ ଦିଗ ଏବଂ ପାୱାର୍ ହେଡ୍ ନିମ୍ନ ଚିତ୍ରରେ ଦର୍ଶାଯାଇଛି |
2. 2 ଅକ୍ଷୀୟ ଟ୍ରାନ୍ସମିସନ୍ ଫିଡ୍ ଅଂଶର ମୁଖ୍ୟ ଗଠନ |
2.2.1 X ଅକ୍ଷ: ପାୱାର୍ ହେଡ୍ ପରବର୍ତ୍ତୀ ସମୟରେ ଆଧାରର ଗାଇଡ୍ ରେଳ ସହିତ ପ୍ରତିକ୍ରିୟା କରେ |
X1-axis ଡ୍ରାଇଭ୍: ଏସି ସର୍ଭୋ ମୋଟର ପ୍ଲସ୍ ଏବଂ ଉଚ୍ଚ-ସଠିକତା ଗ୍ରହ ଗ୍ରହୀତା, X- ଅକ୍ଷାର ର ar ଖ୍ୟ ଗତି ହୃଦୟଙ୍ଗମ କରିବା ପାଇଁ ବଲ୍ ସ୍କ୍ରୁ ଡ୍ରାଇଭ୍ ମାଧ୍ୟମରେ ପାୱାର୍ ହେଡ୍ ଚଲାଇବା ପାଇଁ ବ୍ୟବହୃତ ହୁଏ |
X2-axis ଟ୍ରାନ୍ସମିସନ୍: ଏସି ସର୍ଭୋ ମୋଟର ପ୍ଲସ୍ ଏବଂ ଉଚ୍ଚ-ସଠିକତା ଗ୍ରହ ଗ୍ରହ ରିଡ୍ୟୁଟର, X- ଅକ୍ଷ ର line ଖ୍ୟ ଗତି ହୃଦୟଙ୍ଗମ କରିବା ପାଇଁ ବଲ୍ ସ୍କ୍ରୁ ଟ୍ରାନ୍ସମିସନ ମାଧ୍ୟମରେ ପାୱାର ହେଡ୍ ଚଳାଇବା ପାଇଁ ବ୍ୟବହୃତ ହୁଏ |
ଗାଇଡ୍ ରେଳ ଫର୍ମ: ପ୍ରଶସ୍ତ ଆଧାରରେ ଦୁଇଟି ଉଚ୍ଚ-ଶକ୍ତି ସଠିକତା ର line ଖ୍ୟ ଗାଇଡ୍ ରେଲ୍ ଟାଇଲ୍ ହୋଇଛି |
2.2 Y1 ଅକ୍ଷ: ଶକ୍ତି ହେଡ୍ ସ୍ତମ୍ଭ ଉପରେ ଉପର ଏବଂ ତଳକୁ ପ୍ରତିକ୍ରିୟା କରେ |
Y1-axis ଡ୍ରାଇଭ୍: Y1-axis ର ର ar ଖ୍ୟ ଗତି ହୃଦୟଙ୍ଗମ କରିବାକୁ ବଲ୍ ସ୍କ୍ରୁ ମାଧ୍ୟମରେ ଡ୍ରାଇଭ୍ କରିବାକୁ AC ସର୍ଭୋ ମୋଟର ଗ୍ରହଣ କରନ୍ତୁ | ଗାଇଡ୍ ରେଳ ଫର୍ମ: 45 ପ୍ରକାରର ର line ଖ୍ୟ ଗାଇଡ୍ ରେଳର 4 ଖଣ୍ଡ |
2.2.3 Y2 ଅକ୍ଷ: ଶକ୍ତି ହେଡ୍ ସ୍ତମ୍ଭ ଉପରେ ଉପର ଏବଂ ତଳକୁ ପ୍ରତିକ୍ରିୟା କରେ |
Y2- ଅକ୍ଷ ସଂକ୍ରମଣ: AC ସର୍ଭୋ ମୋଟର Y1-axis ର ର ar ଖ୍ୟ ଗତି ହୃଦୟଙ୍ଗମ କରିବା ପାଇଁ ବଲ୍ ସ୍କ୍ରୁ ମାଧ୍ୟମରେ ଚଲାଇବା ପାଇଁ ବ୍ୟବହୃତ ହୁଏ |
ଗାଇଡ୍ ରେଳ ଫର୍ମ: 45 ପ୍ରକାରର ର line ଖ୍ୟ ଗାଇଡ୍ ରେଳର 4 ଖଣ୍ଡ |
2.2.4 Z1 ଅକ୍ଷ: ପାୱାର୍ ହେଡ୍ ସାଦର ଉପରେ ପଛକୁ ଏବଂ ପ୍ରତିକ୍ରିୟା କରେ |
Z1- ଅକ୍ଷ ସଂକ୍ରମଣ: AC ସର୍ଭୋ ମୋଟର ଏବଂ ଉଚ୍ଚ ସଠିକତା ବିଶିଷ୍ଟ ଗ୍ରହ ଗ୍ରହୀତା Z1- ଅକ୍ଷାର ର ar ଖ୍ୟ ଗତି ହୃଦୟଙ୍ଗମ କରିବା ପାଇଁ ବଲ୍ ସ୍କ୍ରୁ ମାଧ୍ୟମରେ ଗତି ଚଳାଇବା ପାଇଁ ବ୍ୟବହୃତ ହୁଏ |
2.2.5 Z2 ଅକ୍ଷ: ପାୱାର୍ ହେଡ୍ ସାଦର ଉପରେ ପଛକୁ ଏବଂ ପ୍ରତିକ୍ରିୟା କରେ |
Z2-axis ଟ୍ରାନ୍ସମିସନ୍: AC ସର୍ଭୋ ମୋଟର ଏବଂ ଉଚ୍ଚ-ସଠିକତା ଗ୍ରହ ଗ୍ରନ୍ଥକାରୀ Z2-axis ର line ଖ୍ୟ ଗତି ହୃଦୟଙ୍ଗମ କରିବା ପାଇଁ ବଲ୍ ସ୍କ୍ରୁ ମାଧ୍ୟମରେ ଗତି ଚଳାଇବା ପାଇଁ ବ୍ୟବହୃତ ହୁଏ |
2.ଚିପ୍ ଅପସାରଣ ଏବଂ ଥଣ୍ଡା |
ୱର୍କବେଞ୍ଚ ତଳେ ଉଭୟ ପାର୍ଶ୍ୱରେ ଫ୍ଲାଟ ଚେନ ଚିପ କନଭେୟର ସ୍ଥାପିତ ହୋଇଛି ଏବଂ ସଭ୍ୟ ଉତ୍ପାଦନକୁ ହୃଦୟଙ୍ଗମ କରିବା ପାଇଁ ଶେଷରେ ଲୁହା ଚିପ୍ସ ଚିପ କନଭେୟରରେ ଡିସଚାର୍ଜ ହୋଇପାରିବ | ଚିପ୍ କନଭେୟରର କୁଲାଣ୍ଟ ଟ୍ୟାଙ୍କରେ ଏକ କୁଲିଂ ପମ୍ପ ଅଛି, ଯାହା ଉପକରଣର କାର୍ଯ୍ୟଦକ୍ଷତା ଏବଂ ସେବା ଜୀବନକୁ ସୁନିଶ୍ଚିତ କରିବା ପାଇଁ ଉପକରଣର ଆଭ୍ୟନ୍ତରୀଣ କୁଲିଂ + ବାହ୍ୟ ଥଣ୍ଡା ପାଇଁ ବ୍ୟବହାର କରାଯାଇପାରିବ ଏବଂ କୁଲାଣ୍ଟକୁ ପୁନ yc ବ୍ୟବହାର କରାଯାଇପାରିବ |
3। ସମ୍ପୂର୍ଣ୍ଣ ଡିଜିଟାଲ୍ ସାଂଖ୍ୟିକ ନିୟନ୍ତ୍ରଣ ବ୍ୟବସ୍ଥା:
3.1। ଚିପ୍ ବ୍ରେକିଙ୍ଗ୍ ଫଙ୍କସନ୍ ସହିତ, ଚିପ୍ ବ୍ରେକିଙ୍ଗ୍ ଟାଇମ୍ ଏବଂ ଚିପ୍ ବ୍ରେକିଙ୍ଗ୍ ଚକ୍ର ମ୍ୟାନ୍-ମେସିନ୍ ଇଣ୍ଟରଫେସରେ ସେଟ୍ ହୋଇପାରିବ |
3.2। ଟୁଲ୍ ଲିଫ୍ଟିଙ୍ଗ୍ ଫଙ୍କସନ୍ ସହିତ, ଟୁଲ୍ ଉଠାଇବା ଦୂରତା ମ୍ୟାନ୍-ମେସିନ୍ ଇଣ୍ଟରଫେସରେ ସେଟ୍ ହୋଇପାରିବ | ଯେତେବେଳେ ଦୂରତା ପହଞ୍ଚିବ, ଉପକରଣଟି ଶୀଘ୍ର ଉଠାଯିବ, ଏବଂ ତାପରେ ଚିପ୍ସ ଫିଙ୍ଗି ଦିଆଯିବ, ଏବଂ ତାପରେ ଡ୍ରିଲିଂ ପୃଷ୍ଠକୁ ଦ୍ରୁତ ଗତିରେ ଆଗକୁ ବ and ଼ିବ ଏବଂ ସ୍ୱୟଂଚାଳିତ ଭାବରେ କାର୍ଯ୍ୟରେ ପରିଣତ ହେବ |
3.2। କେନ୍ଦ୍ରୀୟ ଅପରେସନ୍ କଣ୍ଟ୍ରୋଲ୍ ବକ୍ସ ଏବଂ ହ୍ୟାଣ୍ଡହେଲ୍ଡ ୟୁନିଟ୍ ସାଂଖ୍ୟିକ ନିୟନ୍ତ୍ରଣ ପ୍ରଣାଳୀ ଗ୍ରହଣ କରେ ଏବଂ USB ଇଣ୍ଟରଫେସ୍ ଏବଂ LCD ତରଳ ସ୍ଫଟିକ୍ ପ୍ରଦର୍ଶନ ସହିତ ସଜ୍ଜିତ | ପ୍ରୋଗ୍ରାମିଂ, ଷ୍ଟୋରେଜ୍, ପ୍ରଦର୍ଶନ ଏବଂ ଯୋଗାଯୋଗକୁ ସୁଗମ କରିବା ପାଇଁ, ଅପରେସନ୍ ଇଣ୍ଟରଫେସରେ ମ୍ୟାନ୍-ମେସିନ୍ ସଂଳାପ, ତ୍ରୁଟି କ୍ଷତିପୂରଣ ଏବଂ ସ୍ୱୟଂଚାଳିତ ଆଲାର୍ମ ଭଳି କାର୍ଯ୍ୟ ଅଛି |
3.2 .. ଯନ୍ତ୍ରପାତିଗୁଡିକ ପ୍ରକ୍ରିୟାକରଣ ପୂର୍ବରୁ ଛିଦ୍ର ସ୍ଥିତିକୁ ପୂର୍ବାବଲୋକନ ଏବଂ ପୁନ - ଯାଞ୍ଚ କରିବାର କାର୍ଯ୍ୟ କରିଥାଏ, ଏବଂ କାର୍ଯ୍ୟଟି ଅତ୍ୟନ୍ତ ସୁବିଧାଜନକ ଅଟେ |
4। ସ୍ୱୟଂଚାଳିତ ତେଲ |
ମେସିନ୍ ସଠିକତା ର line ଖ୍ୟ ଗାଇଡ୍ ରେଳ ଯୁଗଳ, ସଠିକତା ବଲ୍ ସ୍କ୍ରୁ ଯୁଗଳ ଏବଂ ଅନ୍ୟାନ୍ୟ ଉଚ୍ଚ-ସଠିକତା ଗତି ଯୁଗଳ ସ୍ୱୟଂଚାଳିତ ତ ric ଳ ପ୍ରଣାଳୀ ସହିତ ସଜ୍ଜିତ | ସ୍ୱୟଂଚାଳିତ ଲବ୍ରିକେଟ୍ ପମ୍ପ ଚାପ ତେଲ ନିର୍ଗତ କରେ ଏବଂ ପରିମାଣିକ ଲବ୍ରିକେଟର ତେଲ ଚାମ୍ବର ତେଲରେ ପ୍ରବେଶ କରେ | ଯେତେବେଳେ ତେଲ ଚାମ୍ବରରେ ତେଲରେ ଭର୍ତି ହୁଏ ଏବଂ ସିଷ୍ଟମ୍ ଚାପ 1.4 ~ 1.75Mpa କୁ ବ ises େ, ସିଷ୍ଟମରେ ଥିବା ପ୍ରେସର ସୁଇଚ୍ ବନ୍ଦ ହୋଇଯାଏ, ପମ୍ପ ବନ୍ଦ ହୋଇଯାଏ ଏବଂ ଅନଲୋଡିଂ ଭଲଭ୍ ଏକାସାଙ୍ଗରେ ଅନଲୋଡ୍ ହୁଏ | ଯେତେବେଳେ ରାସ୍ତାରେ ତେଲ ଚାପ 0.2Mpa ତଳକୁ ଖସିଯାଏ, ପରିମାଣିକ ଲବ୍ରିକେଟର ଲବ୍ରିକେଟ୍ ପଏଣ୍ଟ ଭରିବା ଆରମ୍ଭ କରେ ଏବଂ ଗୋଟିଏ ତେଲ ଭରିବା ସମାପ୍ତ କରେ | ପରିମାଣିକ ତ oil ଳ ଦ୍ lied ାରା ଯୋଗାଯାଇଥିବା ସଠିକ୍ ପରିମାଣର ତ oil ଳ ଏବଂ ସିଷ୍ଟମ୍ ଚାପ ଚିହ୍ନଟ କରିବାର କ୍ଷମତା ହେତୁ, ତେଲ ଯୋଗାଣ ନିର୍ଭରଯୋଗ୍ୟ ଏବଂ ନିଶ୍ଚିତ କରେ ଯେ ପ୍ରତ୍ୟେକ କିଏନାମେଟିକ୍ ଯୋଡିର ପୃଷ୍ଠରେ ଏକ ତେଲ ଫିଲ୍ମ ଅଛି, ଯାହା ଘର୍ଷଣ ଏବଂ ପରିଧାନକୁ ହ୍ରାସ କରିଥାଏ ଏବଂ କ୍ଷତିରୁ ରକ୍ଷା କରିଥାଏ | ଅତ୍ୟଧିକ ଗରମ ହେତୁ ଆଭ୍ୟନ୍ତରୀଣ ଗଠନକୁ | , ଯନ୍ତ୍ରର ସଠିକତା ଏବଂ ଜୀବନ ନିଶ୍ଚିତ କରିବାକୁ |
5. ମେସିନ୍ପରିବେଶ ବ୍ୟବହାର କରନ୍ତୁ:
ବିଦ୍ୟୁତ୍ ଯୋଗାଣ: ତିନି-ପର୍ଯ୍ୟାୟ AC380V ± 10%, 50Hz ± 1 ପରିବେଶ ତାପମାତ୍ରା: -10 ° ~ 45 ° |
6। ଗ୍ରହଣ ମାନଦଣ୍ଡ:
JB / T10051-1999 "ଧାତୁ କଟି ଯନ୍ତ୍ରର ହାଇଡ୍ରୋଲିକ୍ ସିଷ୍ଟମ୍ ପାଇଁ ସାଧାରଣ ଯାନ୍ତ୍ରିକ ନିର୍ଦ୍ଦିଷ୍ଟତା" |
7। ଯାନ୍ତ୍ରିକ ପାରାମିଟରଗୁଡିକ |:
| ମଡେଲ୍ | | 2050-5Z | |
| ସର୍ବାଧିକ ପ୍ରକ୍ରିୟାକରଣ କାର୍ଯ୍ୟକ୍ଷେତ୍ର ଆକାର | | ଦ Length ର୍ଘ୍ୟ × ମୋଟେଇ × ଉଚ୍ଚତା | (mm) | 5000 × 2000 × 1500 |
| କାର୍ଯ୍ୟ ଡେସ୍କ ଆକାର | | ଦ Length ର୍ଘ୍ୟ X ମୋଟେଇ (mm) | 5000 * 2000 |
| ଶକ୍ତି ହେଡ୍ ବେସ୍ ଦିଗ ଯାତ୍ରା | | ପଛକୁ ଏବଂ ଆଗକୁ ଯାଆନ୍ତୁ (mm) | 5000 |
| ଶକ୍ତି ମୁଣ୍ଡ ଉପରକୁ ଏବଂ ତଳକୁ | | ରାମର ଉପର ଏବଂ ତଳ ଷ୍ଟ୍ରୋକ୍ (mm) | 1500 |
|
ଭୂସମାନ୍ତର ରାମ ପ୍ରକାର ଡ୍ରିଲିଂ ପାୱାର ହେଡ୍ ପାୱାର ହେଡ୍ 1 2 | | ପରିମାଣ (2 PC) | ୨ |
| ସ୍ପିଣ୍ଡଲ୍ ଟେପର | | BT50 | |
| ଡ୍ରିଲିଂ ବ୍ୟାସ (ମିମି) | Φ2-Φ60 | |
| ବ୍ୟାସ ଟ୍ୟାପ୍ (mm) | M3-M30 | |
| ସ୍ପିଣ୍ଡଲ୍ ସ୍ପିଡ୍ (r / ମିନିଟ୍) | 30 ~ 3000 | |
| ସର୍ଭୋ ସ୍ପିଣ୍ଡଲ୍ ମୋଟର ଶକ୍ତି (kw) | 22 * 2 | |
| ବାମ ଏବଂ ଡାହାଣ ଯାତ୍ରା (mm) | 600 | |
| ଦ୍ୱି-ଦିଗୀୟ ପୋଜିସନ୍ ସଠିକତା | | 300mm * 300mm | ± 0.025 |
| ଦ୍ୱି-ଦିଗିତ ପୁନରାବୃତ୍ତି ପୋଜିସନ୍ ସଠିକତା | | 300mm * 300mm | ± 0.02 |





